

Ijraset Journal For Research in Applied Science and Engineering Technology
Application of ANFIS to Minimize Total Harmonic Distortion in Brushless DC Motor
Authors: K.M.N. Chaitanya Kumar Reddy, Dr. N. Kanagasabai, Dr. N. Gireesh
DOI Link: https://doi.org/10.22214/ijraset.2023.54581
Certificate: View Certificate
Abstract
Total harmonic distortion provides direct impact on power quality in distributed systems. The work presents reduction of Total harmonic distortion (THD) in Brushless DC motor (BLDC) using adaptive neuro controller. The configured controller is provided with a rule base, input and output membership functions. The BLDC motor is modelled in MATLAB-SIMULINK with load variation that have direct impact on the functioning of a system. The parameters include load, resistance and inertia of BLDC motor. The work results are obtained after simulating BLDC system under different load configurations. The conclusion is provided with the calculation of THD so produced using Adaptive neuro configured controller.
Introduction
I. INTRODUCTION
In current situation power quality of distributed systems is directly proportional to the harmonics so produced during the operation. BLDC motors are universally applied in variety of comprehensive electrical applications when related to conventional induction and synchronous reluctance motors as it benefits in providing determined competence, simple conservation, and great uniform flux density. Previously, the variety of conventional controllers have been used in calculating the speed characteristics. But while the working of BLDC motor there will be production of noise which is called as THD – Total Harmonic Distortion along with mechanical work. Total harmonic distortion (THD) is a quantity related to voltage or current distortion range created because of harmonics in the signal. THD is a key feature in acoustic, networks, and power systems and should be as low.
Instigating advanced observing methods like adaptive, variable structure and grouping of fuzzy with neural network, the preferred speed matched can be achieved with a reduced harmonics during BLDC motor application. Therefore an adaptive neuro fuzzy controller have been developed and was applied for reducing the THD during the process.
Electrical energy fluxes also can be distorted, though usually not on purpose. The presence of harmonic distortion in a power load can cause problems. The total harmonic distortion (THD) of an electrical current is the total degree of distortion in comparison to the ideal. The majority of domestic electrical systems employ linear loads. The peaks and troughs of a linear current sine curve are smooth, even, and sinusoidal. In residential circuits, some distortion can occur, but not to the extent that it causes substantial efficiency difficulties. Non-linear loads, on the other hand, are used in many industrial and commercial applications. Harmonic distortion (the consequence of merging numerous waves of changing frequency) introduced by generators, converters, and power supplies can substantially degrade the efficiency of a power system. These loads are inductive and have a low power factor, which means that the quantity of non-working power inside a particular load is a substantial fraction of total apparent power. When a load has a greater power factor, its THD factor decreases and the system becomes more efficient.
II. LITERATURE SURVEY
From the sources of [1],[2],[3] and [4], the BLDC modelling, parameters and the response of the system under various controllers were studied based on which it was observed that fuzzy controller provides best response in categories of speed and torque control when compared to conventional P, PI, PID controllers.
Though research have been done on the usage of adaptive fuzzy based networks in the implementation of BLDC motor [5], since THD plays an effective role in defining the impact on the application of BLDC motor, the work presents the usage of adaptive neuro practice for lessening of total harmonic distortion in Brushless DC motor. The rule base and learning methods of artificial neural networks were studied from [6]. Based on the changes made in the rule base it was observed that the considered controlling method provides economical production in total harmonic distortion.

B. Adaptive Neuro Fuzzy Controller
The considered controller is an Adaptive neuro fuzzy inference system controller which is based on Takagi-Sugeno fuzzy inference system. Neuro-fuzzy systems are distinguished by their ability to combine the benefits of fuzzy logic with neural networks. The core idea behind a neuro-fuzzy system is to mimic a fuzzy logic system with a neural network and then use neural network learning techniques to adjust that fuzzy system. Numerous neuro-fuzzy networks that combine natural language descriptions of fuzzy systems and neural network learning features have been created, with ANFIS being one of the most well-known and commonly used neuro-fuzzy designs. Except for the neural network block, the basic ANFIS control structure comprises the same components as the fuzzy inference system. The network structure is made up of a collection of units (and connections) organised in five interconnected network levels, from layer 1 to layer 5. The suggested ANFIS controller structure is made up of four major components: fuzzification, knowledge base, neural network, and defuzzification. Layer 1 is made up of input variables (membership functions) and membership functions that are triangular or bell shaped. Layer 2 is the membership layer, which examines the weights of each membership function. It gets the first layer's input structure is automatically tuned. The ANFIS strategy can be applied to a variety of control applications due to its adaptability. values and acts as membership functions to represent the fuzzy sets of the corresponding input variables. Layer 3 is known as the rule layer, and it accepts input from the preceding layer. Each node (each neuron) in this layer conducts fuzzy rule pre-condition matching. This layer computes each rule's activation level, and the number of layers equals the number of fuzzy rules. This layer's nodes calculate the weights that will be normalised. Layer 4 is the defuzzification layer, which delivers the output values from rule inference. Layer 5 is referred to as the output layer since it aggregates all of the inputs from Layer 4 and converts the fuzzy classification results into a crisp number. A single output should be produced by weighted average defuzzification. It is required that all output membership functions be of the same type and either linear or constant. It must not share rules; that is, it cannot allow different rules to use the same output membership function.


Conclusion
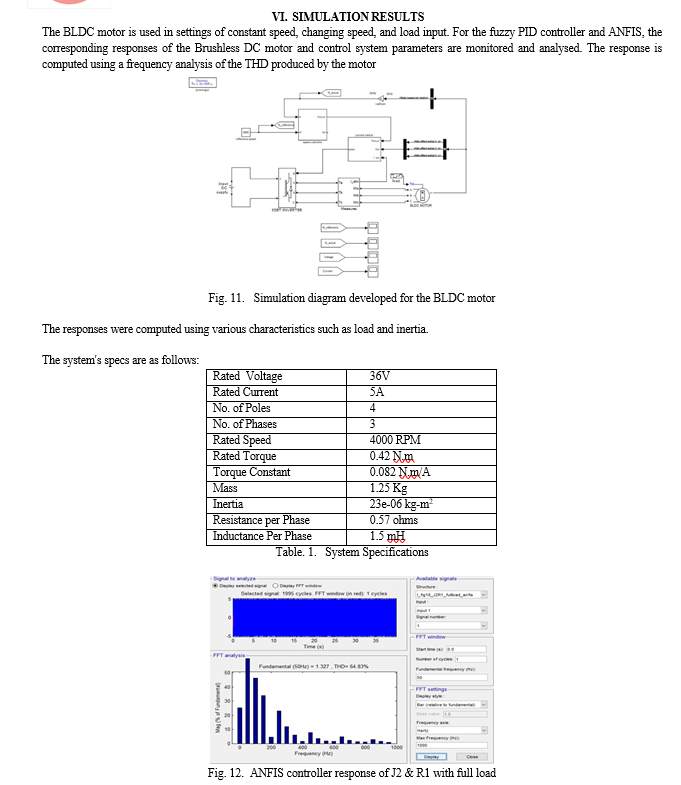
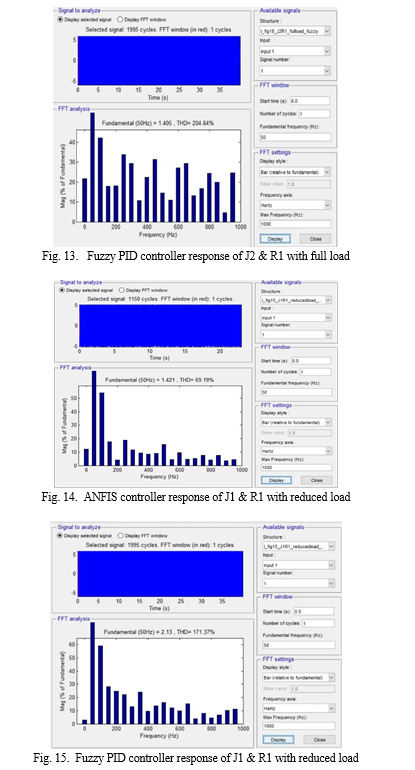
The intended BLDC system was simulated in MATLAB utilising the Fuzzy PID and ANFIS controllers. Under parameter fluctuations, the performance of the ANFIS controller appears to be superior than that of the Fuzzy PID controllers in decreasing harmonic distortion, as measured by the FFT response in the current and voltage waveforms.
References
[1] Shanmugasundram, Zakariah, and Yadaiah, “Low-cost high performance brushless dc motor drive for speed control applications,” in Proc. IEEE Intl. Con. Adv. Recent Technol. Commun. Comput., Kottayam, India, pp. 456–460, Oct. 27–28, 2009 [2] Shanmugasundram, Zakariah, and Yadaiah, “Digital implementation of fuzzy logic controller for wide range speed control of BLDCmotor,” in Proc. IEEE Int. Conf. Veh. Electron. Safety, Pune, India, pp. 119–124, Nov. 10–12, 2009, [3] Raju, S. Srinivasulu, KMNCK REDDY, TKSR KIRAN, and M. Viswanath. “Implementation of PID and Fuzzy PID controllers for Temperature control in CSTR,” International Journal of Advanced Research in Computer Science vol. 4, no. 5 (2013). [4] Marcin Baszynski and Stanislaw Pirog, “A novel speed measurement method for a high-speed BLDC motor based on the rotor position sensor”, IEEE Trans. on Industrial Informatics, Vol.10, No. 1, pp. 84-91, February 2014. [5] Robert Horvat and Karel Jezernik, “An event-driven approach to the current control of a BLDC motor based FPGA”, IEEE Trans.on Industrial Electronics, Vol. 61, No. 7, pp.3719- 3726. 2014. [6] Kandiban, Rajendran, and R. Arulmozhiyal. \\\"Speed control of BLDC motor using adaptive fuzzy PID controller.\\\" Procedia Engineering 38 (2012): 306-313. [7] Kim, Ilhwan, et al. \\\"Compensation of torque ripple in high performance BLDC motor drives.\\\" Control Engineering Practice 18.10 pp. 1166-1172. 2010. [8] Yigit, Tevfik, and Hakan Celik. \\\"Speed controlling of the PEM fuel cell powered BLDC motor with FOPI optimized by MSA.\\\" International Journal of Hydrogen Energy 45.60 (2020): 35097-35107. [9] Im, Hyungbin, Hong Hee Yoo, and Jintai Chung. \\\"Dynamic analysis of a BLDC motor with mechanical and electromagnetic interaction due to air gap variation.\\\" Journal of Sound and Vibration 330.8 (2011): 1680-1691. [10] Yamashita, Rodrigo Y., et al. \\\"Comparison between two models of BLDC motor, simulation and data acquisition.\\\" Journal of the Brazilian Society of Mechanical Sciences and Engineering 40.2 (2018): 1-11. [11] Asaei, Behzad, and Alireza Rostami. \\\"A novel starting method for BLDC motors without the position sensors.\\\" Energy Conversion and Management 50.2 (2009): 337-343. [12] Priyanka, C. P., and G. Jagadanand. \\\"Design and Analysis of BLDC Motor for Electric Vehicle Application.\\\" Advances in Automation, Signal Processing, Instrumentation, and Control. Springer, Singapore, 2021. 977-985. [13] Pedapenki, Kishore Kumar, and Jayendra Kumar. \\\"Fuzzy Logic Controller-Based BLDC Motor Drive.\\\" Recent Advances in Power Electronics and Drives. Springer, Singapore, 2021. 379-388. [14] Tang, Kit-Sang, et al. \\\"An optimal fuzzy PID controller.\\\" IEEE transactions on industrial electronics 48.4 (2001): 757-765. [15] Mann, George KI, Bao-Gang Hu, and Raymond G. Gosine. \\\"Analysis of direct action fuzzy PID controller structures.\\\" IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 29.3 (1999): 371-388. [16] Li, Han-Xiong, et al. \\\"An improved robust fuzzy-PID controller with optimal fuzzy reasoning.\\\" IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 35.6 (2005): 1283-1294. [17] Reddy, KMN Chaitanya Kumar, B. Rajani, and P. Sangameswara Raju. “Control of Non Linear Two Mass Drive System using ANFIS,” International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, vol. 5, no. 12, pp. 9214-9224, Dec 2016. doi:10.15662/IJAREEIE.2016.0512014.
Copyright
Copyright © 2023 K.M.N. Chaitanya Kumar Reddy, Dr. N. Kanagasabai, Dr. N. Gireesh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54581
Publish Date : 2023-07-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online